電磁界解析ソフトウェア

電磁界解析ソフトウェア
プランジャ型電磁石およびヒンジ型電磁リレーの
変形を伴う三次元解析
- TOP >
- 機能別解析例・解析技術(一覧) >
- プランジャ型電磁石およびヒンジ型電磁リレーの変形を伴う三次元解析
概要
EMSolutionにおきましては、電磁プランジャのような磁極間の距離が変わる解析では、可動子(アーマチャ)周辺の空気領域の要素を変形させて解析を行います。
解説
変形運動の際、変形空気領域の節点位置を内挿するための二つのメッシュデータ(pre_geom、 deform_mesh)を必要とする方法を"運動と外部回路を連成した電磁場解析"に、変形領域を制御要素(Control Volume要素)で囲うことによりEMSolution内部で自動的に変形させて解析する方法を"変形運動の改良"に示しています。二次元解析では、やや手間はかかりますが最大変形位置での節点をdeform_meshとして作成することも可能ですが、三次元解析ではさらに手間がかかってしまうため、制御要素により変形領域を指定する方法の方が適していると思います。ストロークの大きいリニアアクチュエータは、運動側(可動子)の運動方向に静止側(固定子)の磁極が無い場合、リニアモータと同じ"“モータの解析"で説明しているスライド法を使用する方がよいかと思います。ここでは磁極間距離が変わる三次元モデルを使用し、制御要素を用いた解析事例を示します。変形を伴う解析を行うには変形運動をさせるにはDeformモジュールが、スライド法を用いるにはMotionモジュールが必要となります。
プランジャ型電磁石
プランジャ型電磁石は"運動と外部回路を連成した電磁場解析"、"変形運動の改良"で二次元解析を示していますが、ここではそれとは異なるモデルを使用し、変形を伴う解析を行います。Fig.1に解析モデルを示します。モデルは文献(1)より拝借しています。解析領域はモデルの対称性より1/4モデルとし、モデル下側はヨークコアにより磁路が閉じており、磁束の漏れが少ないと予想できるため、その側の空気領域はそれ程遠方まで作成していません。上側と横側には磁束が漏れるため、下側に対しやや外側まで空気領域を作成しています。制御要素は三角柱と六面体有限要素で作成しており、節点を共有し、その節点は可動側と静止側に少なくともそれぞれ一点接している必要があります。
しかし、変形領域の要素は複数の制御要素の領域内に作成してあれば計算可能です。 おおよその寸法は文献(1)に載っていますが、材料特性、計算条件は載っていませんので、可動子(プランジャ)およびヨークコアはS45Cの非線形磁気特性を与え、コイル100ターンに励磁電流10Aを流すこととします。コイルはELMCURを使用して、CURRENTにターン数密度($T/m^2$)を与えています。コイルにはターン数Tを設定し、電源であるCIRCUITやNETWORKで電流Aを与え、アンペアターン(AT)の電流がコイルに流れると考えた方がわかり良いかと思います。ELMCURは周方向に層状にメッシュ分割がされ要素断面積が一定の場合に使用できるものです。なお、ELMCURは六面体、三角柱要素のみに使用できるもので、上記のような制約があります。そのため、コイルメッシュを四面体で分割したい場合や層状に分割するのが難しい場合ではELMCURは使用できません。その場合はSDEFCOIL、PHICOILをご使用ください。
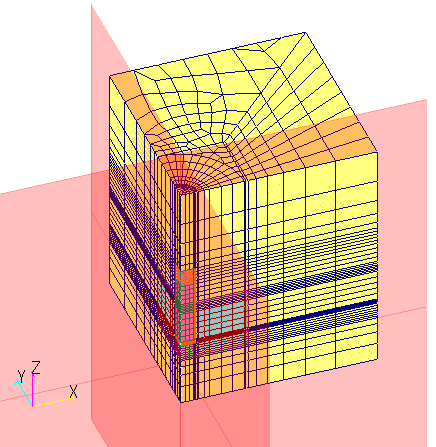
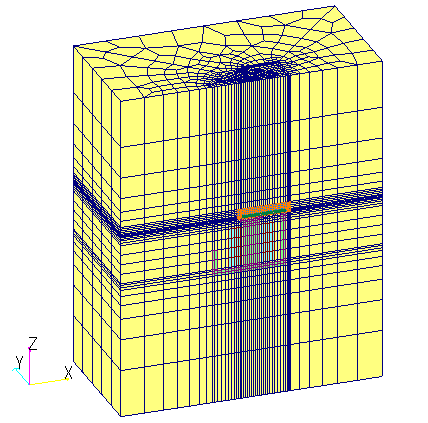
(i) 解析メッシュ
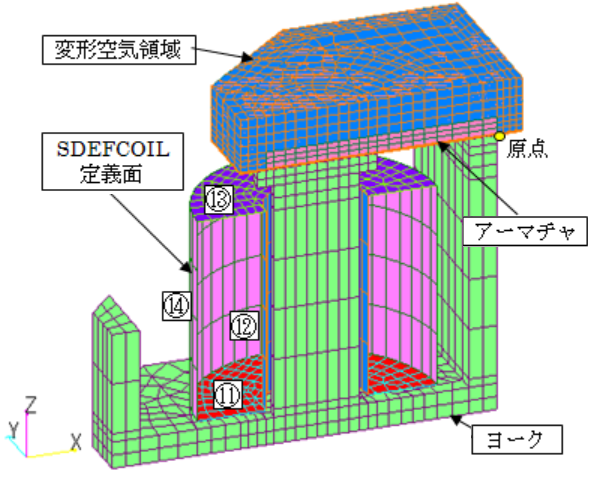
(ii) 部材と可動子周りの変形空気領域
(赤面は対称面を表す)
(iii) 変形空気領域 と制御要素
(Control Volume)
Fig.1 プランジャ型電磁石 解析メッシュ
上記条件での定常吸引力特性を求めてみます。プランジャとヨーク下部磁極間とのギャップ距離を1mm~6mmと強制的に動かして解析します。解析は静磁場解析ですが、強制運動として渦電流を含む場合や回路系に時間依存の素子がある場合も同様に設定して解析可能です。まず基準位置を定義します。"メッシュ変形運動解析における基準位置"でも説明していますように、基準位置は任意に決めることができます。POSITION 0は基準位置からのpre_geomのメッシュ作成の相対位置(距離)を設定します。プランジャ下部のメッシュ作成位置が磁極から3mm上方となっています。この磁極上方3mmを基準位置として決定しますと、POSITION 0=0mと設定し、POSITION 1は磁極から0.2mmの位置としたいため、基準位置からの相対位置をPOSITION 1=-0.0028mと設定することにします。よって、基準位置からの相対位置を時系列データとして時間関数に設定します。この場合、磁極から1mm上方は-0.002mとなり、3mmは0mとなります。そして変形運動を定義するDeformには、Z方向に運動すると設定します。また、磁極上部(0mm)を基準位置としたい場合は、基準位置からのメッシュ作成の相対位置を設定しますので、POSITION 0=0.003mとなります。POSITION 1はPOSITION 0からの相対位置となりますので、POSITION 1=0.0008mとなります。この場合、磁極から1mmは1mm、磁極から3mm上方は3mmとなり、わかりやすくなるかと思います。考え方としては、適当に決めた基準位置からの相対位置(距離)をPOSITION 0、POSITION 1に設定します。なお、POSITION 1- POSITION 0が同じ値であれば、どのように設定しても結果は同じになります。
ヨーク磁極からプランジャまでの距離を1mm~6mmまで1mm刻みとして解析した定常吸引力FzをFig.2に示します。プランジャが磁極からの距離が近いところでは電磁力は急激に大きくなり,逆に離れると小さくなります。離れていくと線形に近い特性となっています。これは,可動子には磁極間との電磁力(マグネットプル)と,可動子からコイルを通ってヨークへ漏れる磁束とコイル電流の間との電磁力(ソレノイドプル)の二つの力が働いており,可動子のコイル侵入深さによって,マグネットプルとソレノイドプルがそれぞれ影響を受けるためです(1)。磁極からプランジャまでの1mmの距離の磁束密度ベクトル図をFig.3に示します。
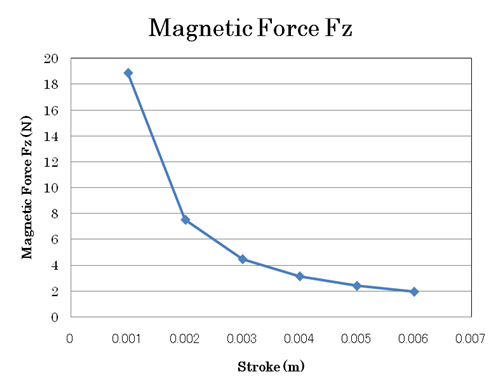
Fig.2 プランジャ型電磁石の
定常吸収特性
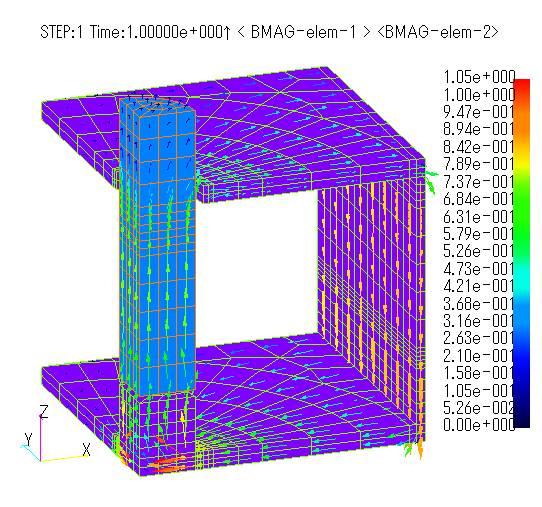
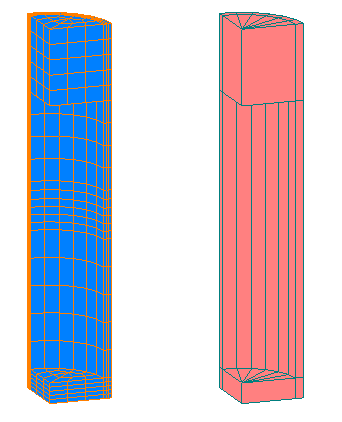
Fig.3 プランジャ型電磁石の
磁束密度ベクトル分布図
ヒンジ型電磁リレー
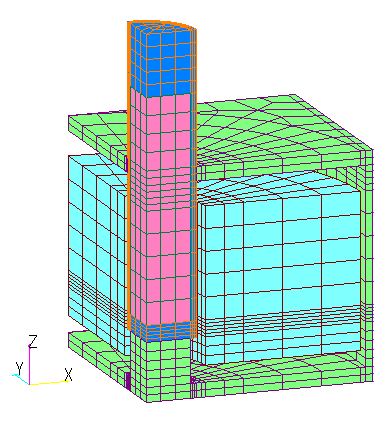
次に、ヒンジ型電磁リレーについて示します。これは狭い角度の回転運動を行わせる代表的な直流電磁石として知られています。解析メッシュをFig.4に示します。対称性よりZX面でカットした1/2領域を有限要素メッシュ作成しています。上部の可動子鉄心がヨークに設けられたヒンジ(支点)を回転中心にしてコイル内の磁極に吸引される際、回転動作をする構造となっています。アーマチャはヨークと接しておらず、0.1mmのギャップを設けています。こちらのモデルも文献(1)に材料特性、計算条件は載っていませんので、可動子(アーマチャ)およびヨークコアはS45Cの非線形磁気特性を与えます。電磁リレーは電圧が突然印加されるため、過大電流が流れすぎないように十分大きなコイル抵抗があるか、もしくは負荷抵抗を繋ぐと思われます。コイル抵抗も負荷抵抗も不明のため、文献値よりやや大きいですが、定格電流200mA、定格電圧12Vとして、コイル抵抗を含めて外部抵抗を60Ωと決めることにします。可動子と磁極とのギャップ長が0.2mmの時の定常吸引力(トルク)がおよそ0.05Nmとなるようにコイルターン数を1000Tとします。なお、コイルは矩形とし、4面を指定して設定するSDEFCOILを使用します。確認の意味も含め,上記条件で定常吸引力特性を求めてみます。アーマチャとヨーク上部磁極間とのギャップ距離を0.1mm~0.7mmと強制的に動かして静磁場解析を行います。上記例と同様,メッシュを変形させたいため,Deformのパラメータを設定します。メッシュ作成位置はアーマチャとヨーク磁極との距離0.1mmで作成していますので,角度は0degとなっています。ここを基準位置とすることにします。そのため,回転中心を定義するため,基準位置とメッシュの全体座標の原点を合わせます。EMSolutionでは回転軸はZ軸とされて解析されますので,全体座標のY軸をローカル座標のZ軸として定義します。ローカル座標は任意の位置に定義できますが,出力値は全体座標値として出力されるため,その場合座標変換が必要になりますのでご注意ください。回転運動ですので,POSITION 1,POSITION 2には角度を設定します。POSITION1=0deg,POSITION2=45degとします。時間関数には基準位置からの相対角度を角度(deg)で設定します。
(i) 解析メッシュ
ZX面:対称面
(ii) 部材と可動子周りの変形空気領域
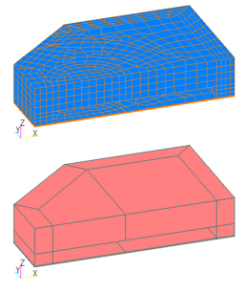
(iii) 変形空気領域と制御要素
(Control Volume)
Fig.4 ヒンジ型電磁石 解析メッシュ
アーマチャとヨーク上部磁極間とのギャップ距離を0.1mm~0.7mm まで0.1mm刻みとして解析した定常吸引力(トルク)をFig.5に示します。解析結果は全体座標系として出力されますので、アーマチャのトルクはMy(Nm)となります。これより、意図したようにギャップ長0.2mmで5Nm程度の電磁吸引力が得られていることがわかります。電磁吸引力は二次関数的に変化していることもわかります。Fig.6にギャップ距離0.1mmと0.7mmの磁束密度分布図を示します。
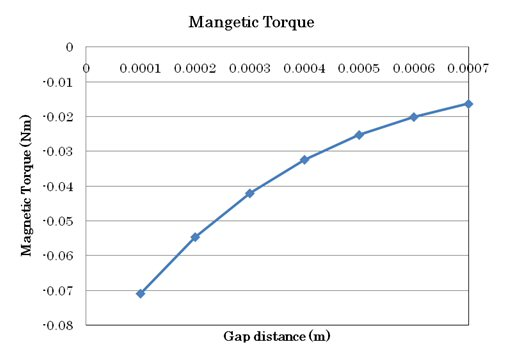
Fig.5 ヒンジ型電位リレーの定常吸引力
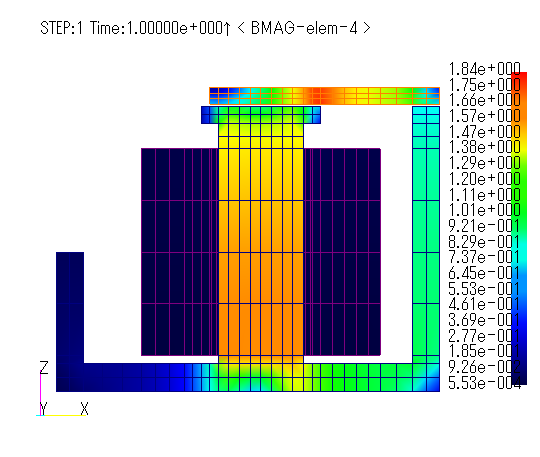
(i) ギャップ距離 0.1mm
(ii) ギャップ距離 0.7mm
Fig.6 ヒンジ型電磁リレー 定常吸引力時の密度分布 [T]
次に、電磁リレーの動作特性を模擬します。電圧をパルス状に印加した時のアーマチャがヨーク磁極と接触する位置までの過渡的な運動特性を解析します。そのためには、電磁力とアーマチャを支えているバネ、それに自重による重力を含めた回転の運動方程式を連成して解析する必要がありますので、Dynamicモジュールで与えます。バネと重力による運動方程式は、(1)式で与えられます。慣性モーメントと重力は回転座標で定義してそれぞれMASS、CONST_FORCEに与え、バネ平衡位置をギャップ距離0.7mmとし、バネ定数SPRING_CONSTを電圧印加後5msでスイッチするように決め、そのときの初期位置を(1)式より計算してINITIAL_POSITIONに与えました。
$$T_g + T_k = l \cdot g / r – k ( x – x_0 ) (1)$$
$T_g$:重力によるトルク($Nm$),
$T_k$,バネによるトルク($Nm$),
$I$:慣性モーメント(イナーシャ)($kg・m^2$),
$g$:重力加速度 -9.8$m/ s^2$,
$r$:アーマチャ長さ($m$),
$k$:バネ定数($Nm/deg$),
$x_0$:バネ平衡位置($deg$),
$x$:変位(初期位置)($deg$)
このように設定することで、(1)式を外力としてEMSolution内部で回転の運動方程式と連成して解析することができます。その結果はmotionファイルに出力されます。スイッチングポイントはギャップ距離0.1mmでされるものとし、ここを下限LOWER_LIMIT=0degとして設定します。
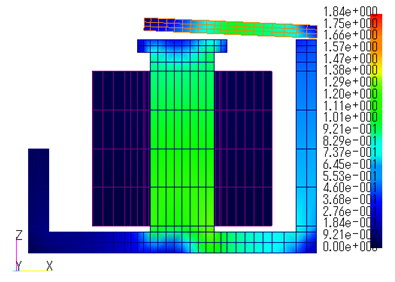
時間ステップを0.25msとし、電圧は0sでパルス状に12V印加されるのを模擬するため、1ステップ前-0.25msで電圧0Vとして解析します。 一般的に、電磁リレーのアーマチャとヨークは部品加工後、ひずみ取り焼鈍処理をしてから組み立てられると思われます。 加工と焼鈍によって磁気特性や導電率が劣化することが知られています。 そこで、アーマチャとヨークに2.0e+6S/mの導電率を与えた渦電流を考慮した解析も行い、導電率を無視した結果と比較してみます。 Fig.7にコイル電流を、Fig.8にトルクを、Fig.9にギャップ距離を示します。 アーマチャが磁極ヨークに吸引されていくに従い、インダクタンスが増加するため励磁電流が一時的に減少する現象までシミュレーションできています。 導電率を与えた場合はパルス的に印加された電圧により渦電流の影響により動作が遅れていることがわかります。 導電率を無視した場合はアーマチャ位置は徐々に吸引されていき、5msでスイッチングポイントである0.1mmに最も近くなり、少し弾んだ後静止する様子が見て取れます。 導電率を考慮した場合は6msよりもやや遅れてスイッチングポイントに達していることがわかります。 トルクも同様に、導電率有り無しで吸引力が異なっていることがわかります。どちらもアーマチャ静止後少して一定値となっています。 Fig.10に導電率有り無しの磁束密度分布図を示します。 導電率無しの場合では鉄心内がほぼ一様に励磁されているのに対し、導電率を考慮した場合では表皮効果により鉄心表面に磁束密度が集中しているため吸引力が落ちていることがわかります。 これらより、実機の特性を模擬するには、渦電流の考慮の有無にも注意が必要だと思われます。
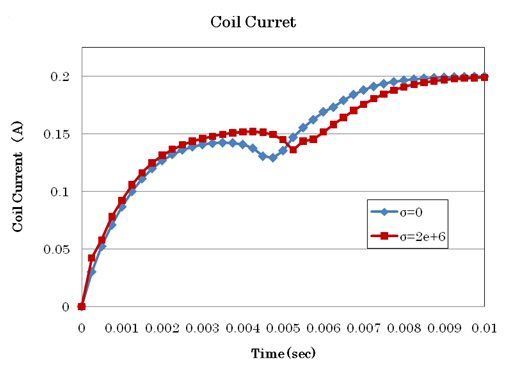
Fig.7 ヒンジ型電磁リレーの
コイル電流波形
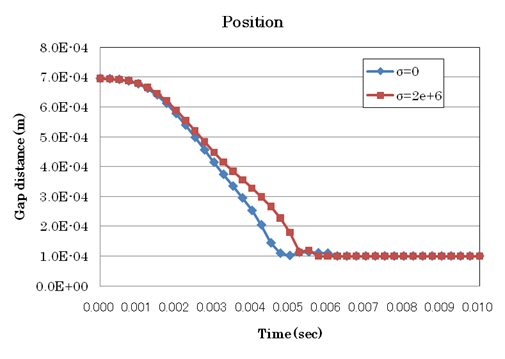
Fig.8 ヒンジ型電磁リレーの
ギャップ距離
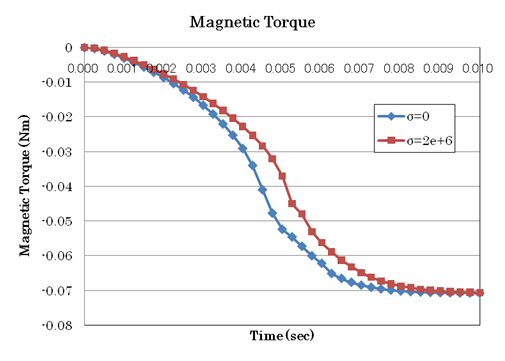
Fig.9 ヒンジ型電磁リレーの動作吸引力
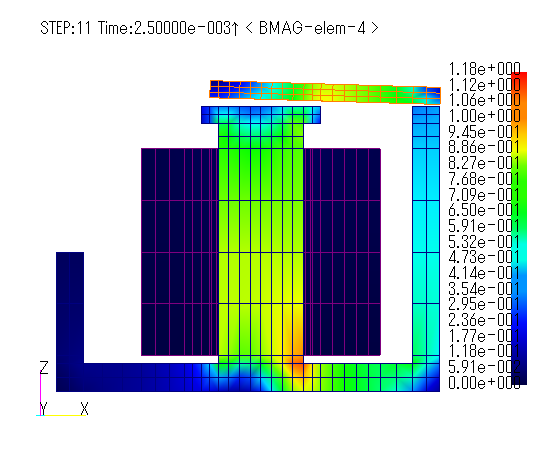
(i) 導電率なし
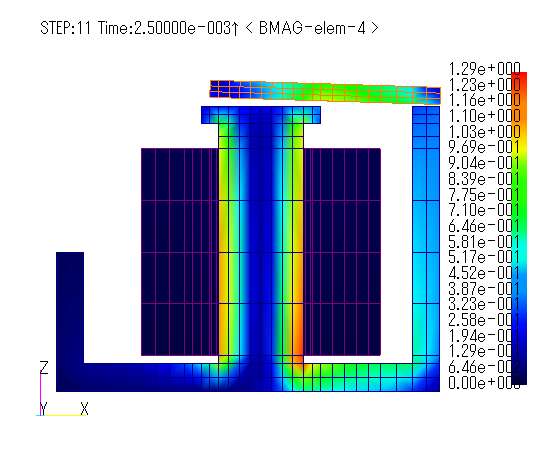
(ii) 導電率あり
Fig.10 ヒンジ型電磁リレー t=2.5msにおける導電率有り無しの磁束密度分布
おわりに
これらより、プランジャ型、ヒンジ型電磁石の解析をEMSolutionのDeformモジュールとDynamicモジュールを用いて解析する方法が示せたと思います。変形領域は空気である必要がありますが、制御要素を使用すれば三次元モデルでも比較的簡単に設定することを示せたかと思います。今回は直流 動作のみでしたが、交流で同様の動作をする交流電磁接触器などの解析も行うことができると思います。ご使用の際に参考になれば幸いです。
参考文献
(1)河瀬,伊藤:「電気・電子機器の実用解析」,森北出版
この先は会員の方のみご覧いただけます。
機能別解析例
運動方程式と外部回路系の連成
- プランジャ型電磁石およびヒンジ型電磁リレーの変形を伴う三次元解析
- メッシュ変形運動解析における基準位置
- 変形運動の改良
- プランジャーの運動解析
- Dynamic moduleへの機能追加 ~ 質量の相対位置依存とリスタート機能 ~
キーワード

©2020 Science Solutions International Laboratory, Inc.
All Rights reserved.