電磁界解析ソフトウェア

電磁界解析ソフトウェア
メッシュ変形運動解析における基準位置
- TOP >
- 機能別解析例・解析技術(一覧) >
- メッシュ変形運動解析における基準位置
概要
EMSoluitionでは、運動する物体(可動部)は剛体であるとし、一方向(x, y, z, 回転)の運動のみ扱えます。そのため、1つの位置座標で充分に位置を表すことが可能です。Handbook「19.3変形部メッシュの運動」で説明している基準位置とは、ユーザが自由に定義する可動部の位置のことを表し、ユーザ自身が便利なように定義してください。基準位置はEMSolutionの入力とはならず、他の入力パラメータを設定するための基準となる位置とお考えください。例えば、可動部の中心がメッシュモデルの原点にある時を基準位置と定義することもできますし、プランジャーなら可動部が固定部に接する最下端にある時と定義することもできます。Fig.1ではわかりやすくするため、可動部の中心を基準位置としています。
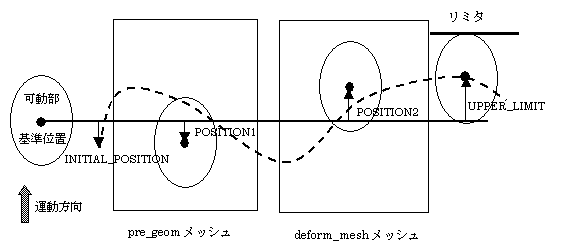
Fig.1 メッシュ変形運動解析における
基準位置と他の位置の関係
解説
時間変化(運動)による可動部の位置を、上記の基準位置からの相対位置(符号付きの距離。回転の場合は角度)で表します。POSITION1はpre_geomメッシュにおける可動部の基準位置からの相対位置を表します。Fig.1では、基準位置より少し下にある、pre_geomメッシュにおける可動部の位置をPOSITION1としています。あるいは、pre_geomメッシュでの可動部の位置を基準位置と定義したいようでしたら、POSITION1=0となります。deform_meshでの可動部の位置を表すPOSITION2も同様に入力します。このとき、Fig.1からもわかるように、deform_meshにおけるPOSITION2は、pre_geomメッシュにおけるPOSITION1の可動部における位置との対応位置を設定してください。"変形運動の改良"の制御要素を使用した場合、deform_meshをPOSITION2の位置に自動生成します。
可動部の位置の時間変化を与える場合も、基準位置からの相対位置として表します。運動連成を行う場合は、位置に係わる諸量(「18.6運動方程式入力」でのINITIAL_POSITION, LOWER_LIMIT, UPPER_LIMIT、「18.6.1スプリングデータ」でのEQUIL_POSITIONや、「18.6.1スプリングデータ」、「18.6.2ダンパーデータ」でのPOSITION 等)は、すべてこの相対位置として表します。INITIAL_POSITIONは運動開始時の初期の相対位置として、LIMITも相対位置に対するリミタ位置として表します。速度に係わる諸量は基準位置に関係致しません。なお、解析結果として可動部の位置をmotionファイルの出力しておりますが、この位置も基準位置からの相対位置となっております。
以上ご説明したように、変形運動解析においては、基準位置の取り方で、位置に係わるすべての量が変わってきます。ただし、一方向の平行運動(移動)ですので、定数分変わるのみです。方向の正負の反転は扱えません。
例として、"変形運動の改良"で示しましたプランジャーの解析データを示します。元のデータでは、基準位置をギャップがゼロの時として定義しております。試しに、初期値位置(ギャップが0.01mの位置)を基準位置と定義します。計算結果である位置変化はFig.2の赤線のようになり、ちょうど元の解析に対して、0.01mずれたものとなります。
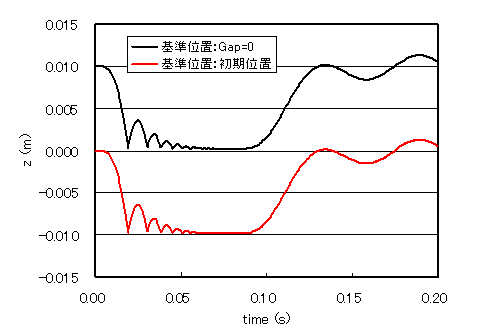
Fig.2 基準位置を変更した場合の
プランジャー位置の変動
この先は会員の方のみご覧いただけます。
機能別解析例
運動方程式と外部回路系の連成
- プランジャ型電磁石およびヒンジ型電磁リレーの変形を伴う三次元解析
- メッシュ変形運動解析における基準位置
- 変形運動の改良
- プランジャーの運動解析
- Dynamic moduleへの機能追加 ~ 質量の相対位置依存とリスタート機能 ~
キーワード

©2020 Science Solutions International Laboratory, Inc.
All Rights reserved.