電磁界解析ソフトウェア

電磁界解析ソフトウェア
Dynamic moduleへの機能追加
~質量の相対位置依存とリスタート機能~
- TOP >
- 機能別解析例・解析技術(一覧) >
- Dynamic moduleへの機能追加 ~ 質量の相対位置依存とリスタート機能 ~
概要
EMSolutionでは 変形運動の際、変形空気領域の節点位置を内挿するための二つのメッシュデータ(pre_geom、 deform_mesh)を必要とする方法を"プランジャーの運動解析"や"プランジャ型電磁石およびヒンジ型電磁リレーの変形を伴う三次元解析"で示していますように,運動方程式との連成解析機能(Dynamic module)を用意しています。本機能は次式で示す運動方程式を解くもので,外力F(x, v)は数式入力でも与えられるものです。加えて,バネ定数は相対位置依存をテーブルデータとして与え,非線形バネを模擬することもできます。この度,質量についても同様にテーブルデータにて相対位置依存を考慮できるようになりましたので報告します。 また,Dynamic moduleを使用した場合のリスタートにも対応致しましたので,併せて報告します。 なお,ダンパーは粘性係数(速度に比例する定数)を相対位置依存,もしくは速度依存をテーブルデータとして入力し,非線形ダンパーを模擬することもできます。
解説
1. 質量の相対位置に対する非線形特性
質量が位置により変化する場合に使用できる機能です。
例えば可動子(アーマチャ)がFig.1に示すように二段にわかれて運動する場合が想定できます。
アーマチャが$m_1$と$m_2$にわかれており, 位置$X_0$を下回るとアーマチャの全質量が$M= m_1$から$m_1+ m_2$になります。
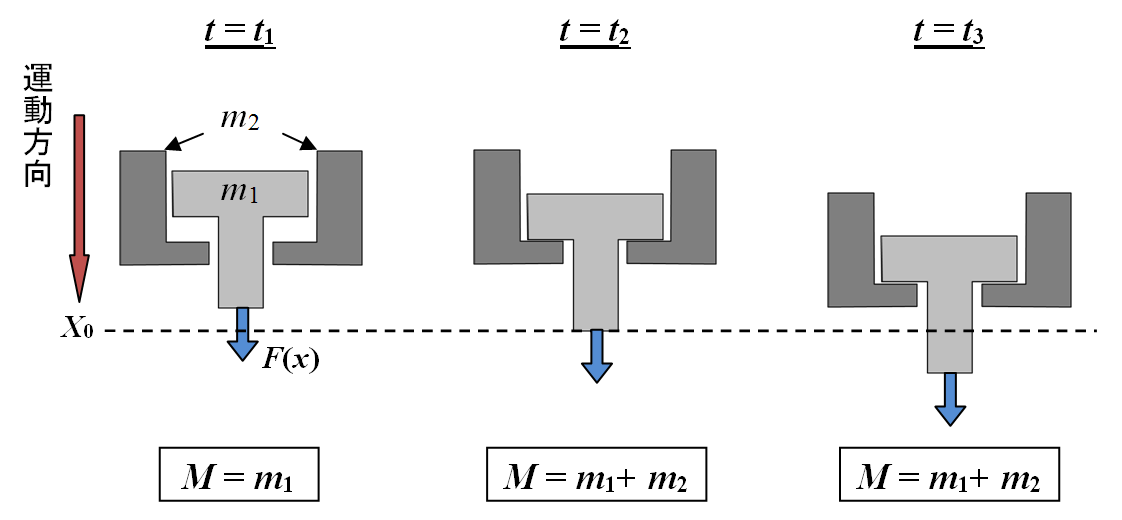
Fig.1 質量の相対位置依存
ここで,相対位置とは"メッシュ変形運動解析における基準位置"からの位置を表わします。 2013/02/28リリース時では,質量変化による運動量の保存を満たしておらず,速度が連続的に変化することになります。 Fig.1に示すように,二物体が衝突する場合,運動量を保存するために速度が変化しますので,速度変化も考慮して解析できるようにしました(2014/01/16)。
例題として,Fig.2に示す"プランジャーの運動解析"で用いたモデルを用いて示します。 擬似的に可動子の根元(モデル領域外)にFig.1で示したような機構があると想定し,相対位置5mmを下回ると質量M=0.09kgの2倍になるとして解析してみます。 渦電流と非線形磁気特性を考慮した運動,外部回路連成過渡磁場解析です。
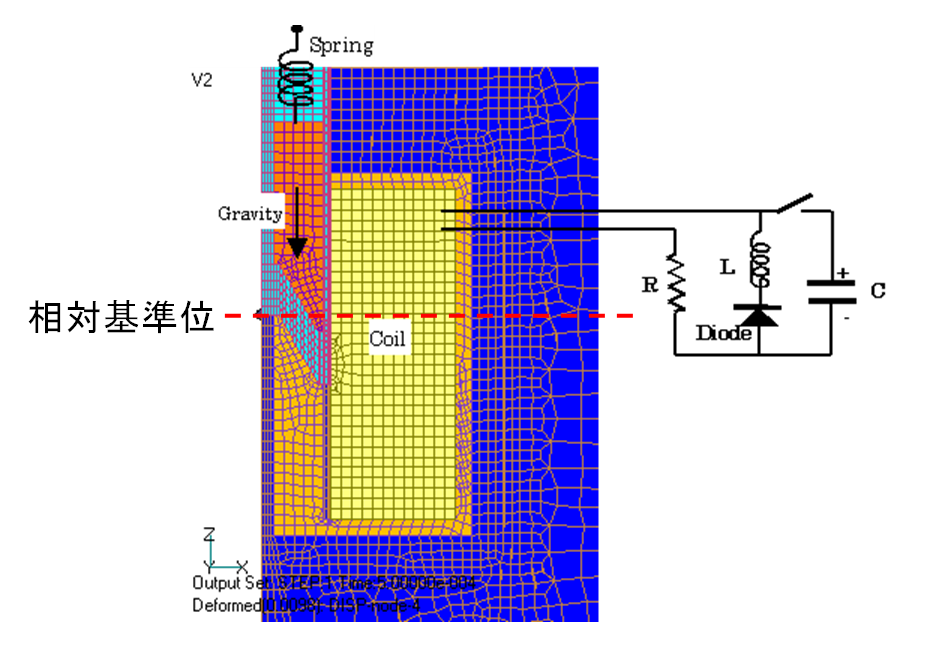
Fig.2 プランジャーモデル
Fig.3に解析結果として相対位置の時間変化グラフ,Fig.4に速度グラフ,Fig.5に電磁力グラフに,質量がM一定(Linear M)と2M一定(Linear 2M)の結果と, 質量の相対位置依存で衝突による速度変化なし(Nonlinear M)と速度変化考慮,運動量保存あり(Collision)の結果を併せて示します。 なお,相対位置の基準位置はアーマチャと対向するヨークコアの先端(アーマチャとヨークコアが接触する位置)を原点とし,初期位置を上方12mmとしています。 これより,Nonlinear Mでは,相対位置5mmで質量が変わるため,M,2Mの結果と異なる運動となっていますが速度は連続的に変化しているのに対し,Collisionでは衝突時で速度変化しており,Nonlinear Mと異なる運動をすることがわかります。
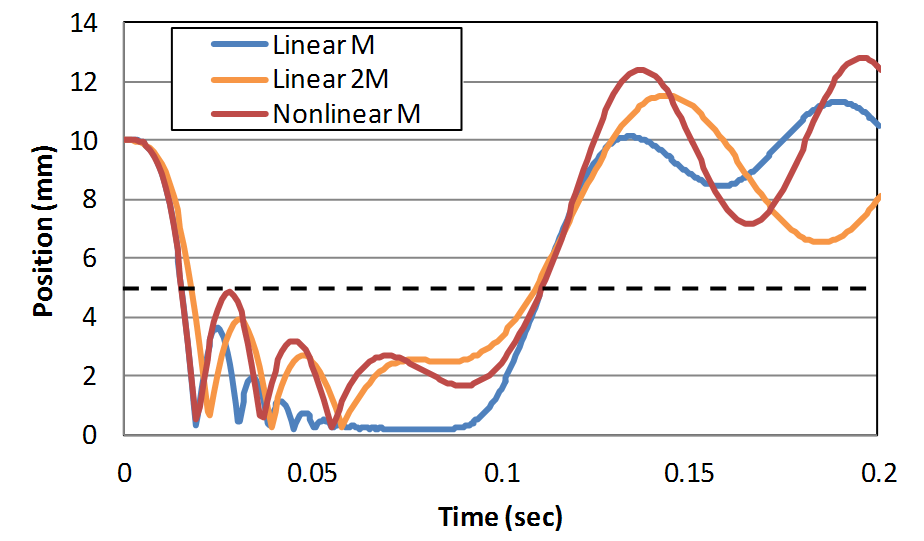
Fig.3 相対位置の時間変化の比較
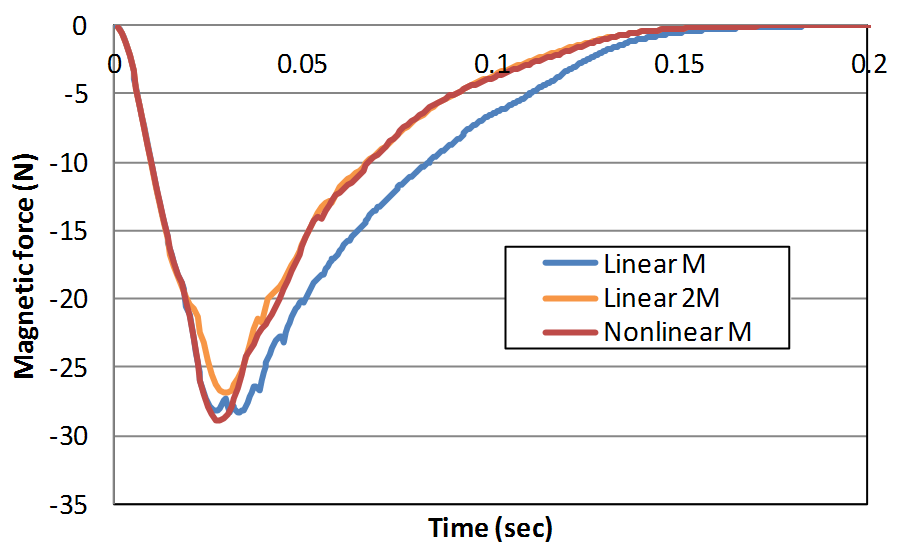
Fig.4 速度の時間変化の比較
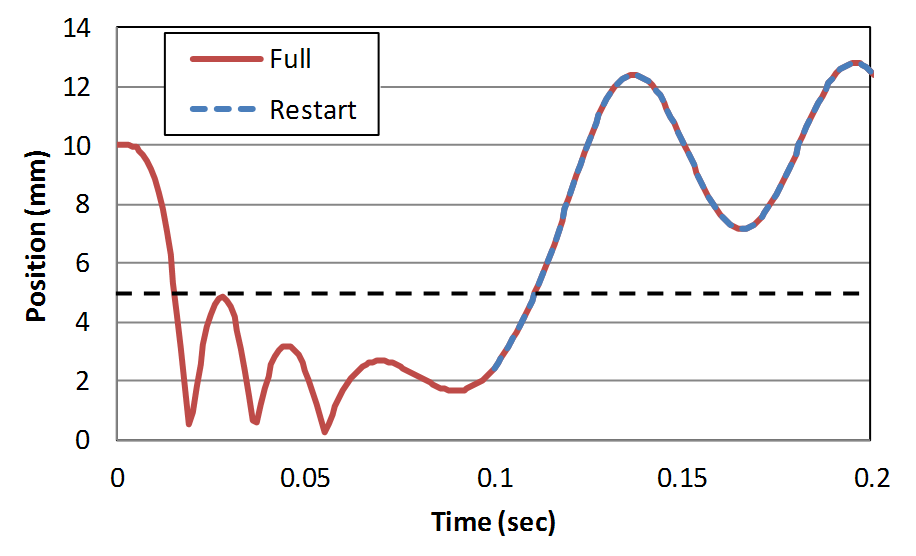
Fig.5 電磁力の時間変化の比較
2. リスタート機能
次に,リスタート機能について説明します。 リスタート計算を行うには,通常の場合と同様に,solutionsファイルをold_solutionsファイルに, 加えてmotionファイルをold_motionファイルに名称変更します。 なお,motionファイルには各時刻での相対位置(POSITION),速度(VELOCITY),電磁力(MAG_FORCE)がテキスト形式で出力されます。 リスタートのinput設定は通常の場合と同様です。 Fig.6に先のNonlinear M 計算での0.1秒からリスタート解析した相対位置の時間変化グラフを元の解析結果と併せて示します。 一致していることが確認できます。
質量の相対位置依存機能とリスタート機能について説明しました。 設計のお役に立てれば幸いです。
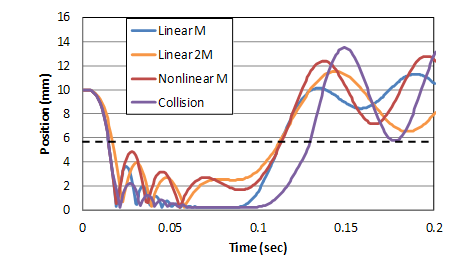
Fig.6 相対位置の
リスタート計算結果の時間変化
この先は会員の方のみご覧いただけます。
機能別解析例
運動方程式と外部回路系の連成
- プランジャ型電磁石およびヒンジ型電磁リレーの変形を伴う三次元解析
- メッシュ変形運動解析における基準位置
- 変形運動の改良
- プランジャーの運動解析
- Dynamic moduleへの機能追加 ~ 質量の相対位置依存とリスタート機能 ~
キーワード

©2020 Science Solutions International Laboratory, Inc.
All Rights reserved.