電磁界解析ソフトウェア

電磁界解析ソフトウェア
かご型誘導機の二次元解析におけるロータバーとエンドリングの取り扱い
- TOP >
- 機能別解析例・解析技術(一覧) >
- かご型誘導機の二次元解析におけるロータバーとエンドリングの取り扱い
概要
かご型誘導電動機(かご型誘導モータ)の磁場解析を行うためには、回転子内のロータバーとエンドリング(概念図Fig.1)を有限要素に分割し、三次元解析する方法が考えられます。しかし、三次元解析では多大の計算時間を必要とし、さらに一般に誘導モータの解析は定常に達するのが遅いことから、端部の影響を考慮しない二次元解析が多く行われております。EMSolutionでもその解析例を"誘導電動機の解析"に示しています。エンドリングを解析に含めず、その効果(主とて抵抗によるもの)を、ロータバーの導電率を小さくすることで近似的に扱っております。この場合、ロータバーの軸方向電流の面積分値はゼロとなるはずですので、SUFCUR(面流入電流ソース)を用いて、その軸方向電流面積分値のトータルをゼロになるように設定しております。二次元解析の場合、このような拘束条件を入れなければ、一般的に軸方向電流積分値がゼロになりません。
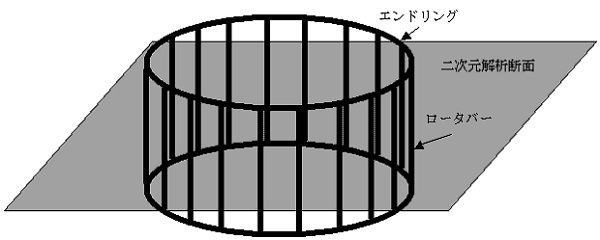
Fig.1 かご型誘導機の
ロータバーとエンドリング
解説
二次元解析で、より現実的な近似法として、エンドリングを抵抗で模擬して電気回路に組み込み、有限要素法と連成して解析する方法が考えられます。Fig.2にその等価回路を示します。有限要素解析領域の点線で示した四角形内はロータバーを表します。また、抵抗はエンドリングを表し、上下で隣接するロータバーを連結しています。ロータバーが等間隔に配置されていると仮定しますと、抵抗値は全て等しくなります。さらに、ロータバーの端部の抵抗を加えたり、インダクティブな効果を入れたりするためのインダクタンスを挿入することも考えられますが、ここでは簡単のため抵抗値のみを扱います。また、上部と下部は同じ電流が流れますので、下部は節点(Fig.2内の黒丸)間を抵抗ゼロで連結し、上部の抵抗値を倍にしても構いません。
Fig.2のような電気回路は、NETWORKモジュールを使用すれば容易に作成でき、有限要素法との連成解析が可能となります。回転周期対称性を考慮しない360度モデルの場合、Fig.2のようにすべてのロータバーとエンドリングを考慮すればよいのですが、多くの場合対称性がありますので、その場合はFig.3のように等価的に分割して有限要素領域と合わせ、その周期分だけ(網目部)をモデル化すれば解析することができます。
例として、N回周期対称モデルで一次側はN直列回路であるとして、1/N分モデル化することを考えます。REGION_FACTOR=Nと設定しますと、一次側の入力電圧、コイル抵抗を全周モデルとして設定できますが、ロータバーおよびエンドリングに流れる二次電流は、全周モデルと同じになるようにエンドリング抵抗をN倍として設定することで、全周モデルで流れる場合の一次、二次電流値と等しくなります。また、REGION_FACTOR=1と設定しますと、逆にエンドリング抵抗は全周モデルとして設定できますが、一次側の入力電圧、コイル抵抗は1/ Nと設定することで、全周モデルで流れる一次、二次電流値と等しくなります。このとき、SUFCURで設定するCURRENTは、どちらの場合も1と設定できます。
"誘導電動機の解析"のモデルにエンドリングを抵抗として近似した例を示します。Fig.4に有限要素メッシュを示します。回転子のロータバーは、全て異なるプロパティ番号を設定する必要があります。また、周期対称面のロータバーは回転対称となりますので、同じプロパティ番号を設定しています。"誘導電動機の解析"では電源回路はCIRCUITで入力し、前述したようにロータバーの導電率をエンドリングの効果を考慮して設定していますが、ここで設定するNETWORKでは、エンドリングの抵抗値を別々に設定できます。
三相交流電源を設定するには、三相独立に回路を設定することもできますが、ここではY字結線することを考えます。CIRCUITで設定する場合、CONNECTION_MATRIXを入力する必要があり、直感的に設定することは容易でありません。NETWORKを使用すると、実際の電源回路そのままを設定することができます。ここでは、相間電圧が100/√3V(実効値)となるようにY字結線しております。電流電源入力とする場合、中性点を大きな抵抗で結ぶ必要があります。"誘導電動機の解析"ではΔ結線をしており、相間電圧が100V(実効値)となります。この場合の結線方法と入力例、および三相交流電源の結線の注意点は、"Δ結線とY結線"をご参照下さい。
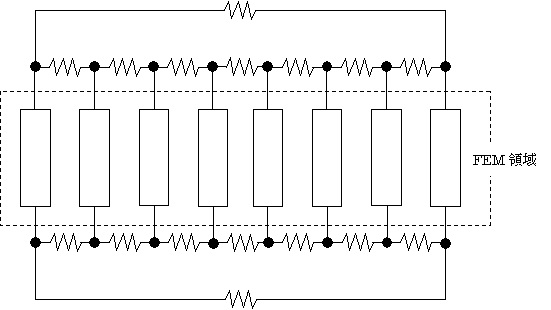
Fig.2 回転子のロータバーとエンドリングの等価回路
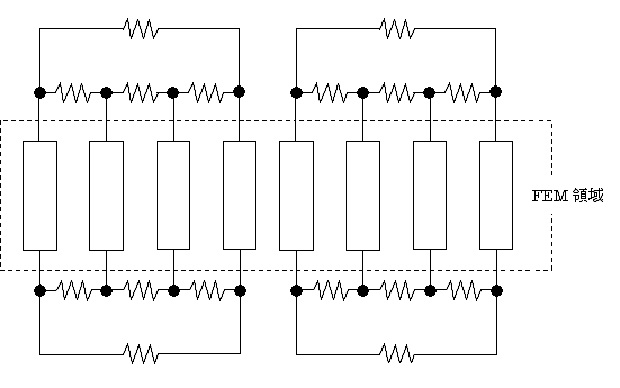
Fig.3 周期対称性がある場合の等価回路
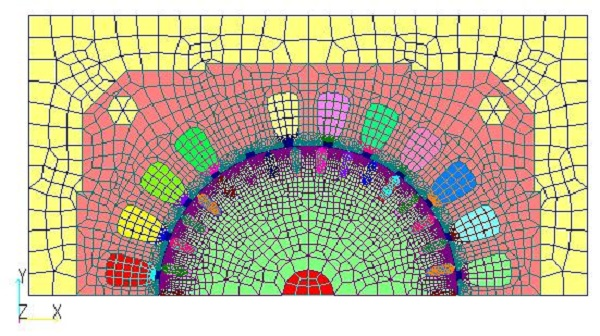
(a) 全体図
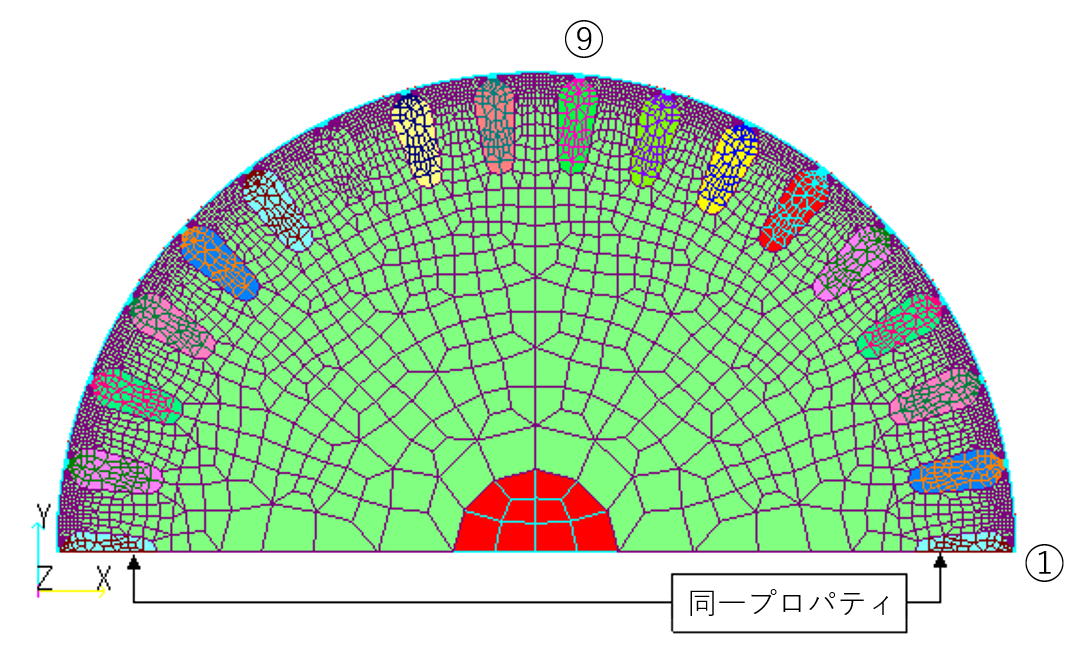
(b) ロータ部拡大図
Fig.4 NETWORKによるエンドリングを考慮した解析メッシュ
すべりS=0.25における解析で得られた固定子一次巻線の電流波形、およびトルク波形をFig.5、6に示します。このモデルでは"誘導電動機の解析"のロータバーの導電率を補正した結果と良い一致を示していることがわかります。Fig.7にFig.4で示したプロパティ番号のロータバーの電流波形を、Fig.8にFig.4のロータバーと接続しているエンドリング電流波形を示します。この方法ですと、二次元解析でもロータバー毎に流れる電流およびエンドリングの電流波形を見ることができます。
現実的には、エンドリングの抵抗は表皮効果による周波数依存性もあり、またエンドリングの形状にも依存すると考えられますので、一概に決定することは難しいと思われます。むしろ、実験結果に良く合うように、抵抗値を調整するのが現実的かと思われます。
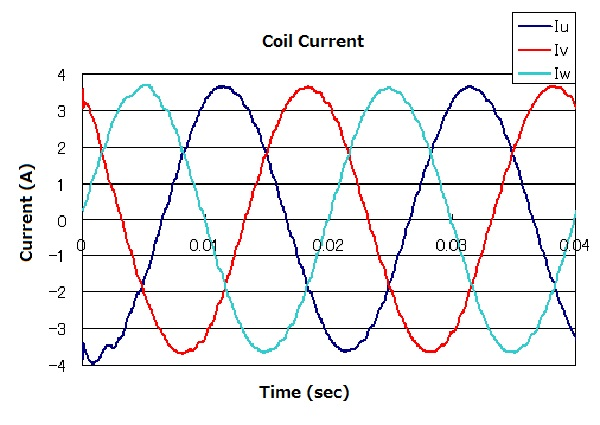
Fig.5 回転数1125rpm、
すべりS=0.25時の
固定子一次巻線の電流変化
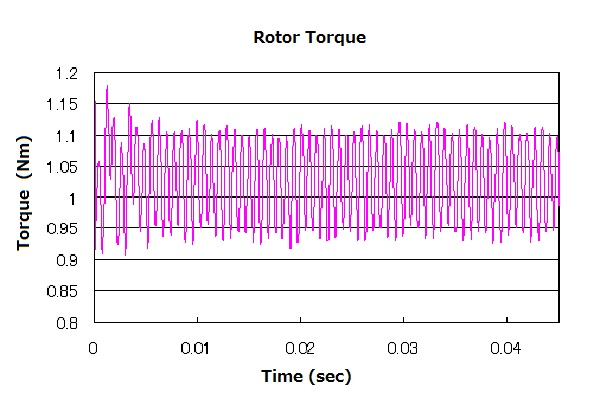
Fig.6 回転数1125rpm、
すべりS=0.25時の
回転子(半分)に働くトルク
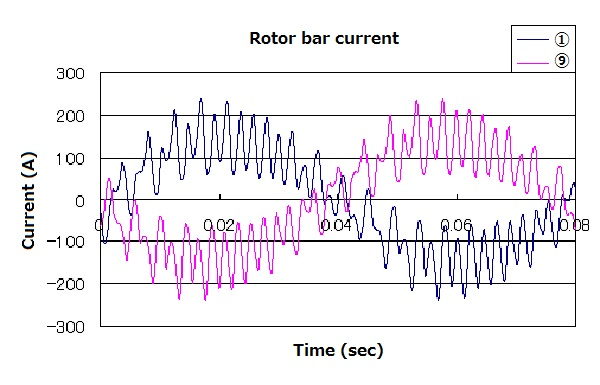
Fig.7 回転数1125rpm、
すべりS=0.25時の
ロータバー電流変化
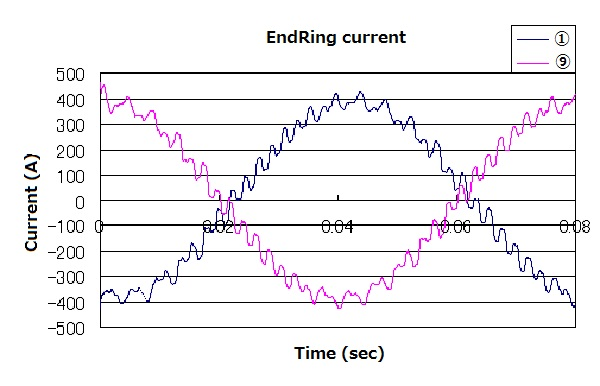
Fig.8 回転数1125rpm、
すべりS=0.25時の
エンドリング電流変化
この先は会員の方のみご覧いただけます。
機能別解析例
誘導電動機の解析
キーワード

©2020 Science Solutions International Laboratory, Inc.
All Rights reserved.